
Sisältö
Nopeus määritellään kohteen nopeudeksi tietyssä suunnassa. Monissa tapauksissa nopeuden löytämiseksi käytämme yhtälöä v = s / t, jossa v on nopeus, s on kohteen siirtymän kokonaismatka alkuperäisestä sijainnistaan ja t on aika, jonka kohteen kuluu. mennä loppuun asti. Teoriassa tämä kaava koskee vain nopeutta keskipitkällä asioita matkalla. Laskemalla kohteen nopeus kulloinkin tietyllä etäisyydellä. Tuo on Kuljetusaika ja se määritetään yhtälöllä v = (ds) / (dt), eli toisin sanoen, se on keskinopeuden yhtälön derivaatti.
Askeleet
Osa 1/3: Laske hetkellinen nopeus
Aloita yhtälöllä nopeuden laskemiseksi siirtymäetäisyyden perusteella. Hetkellisen nopeuden löytämiseksi meillä on ensin oltava yhtälö, joka osoittaa kohteen sijainnin (siirtymän suhteen) kulloinkin. Tämä tarkoittaa, että yhtälössä on oltava vain yksi muuttuja S toisella puolella ja käännä t Toisella puolella (ei välttämättä vain yksi muuttuja), näin:s = -1,5t + 10t + 4
- Tässä yhtälössä muuttujat ovat:
- s = siirtymä. Etäisyys, jonka kohde siirtyi alkuperäisestä sijainnistaan. Esimerkiksi jos esine voi kävellä 10 metriä eteenpäin ja 7 metriä taaksepäin, sen kokonaismatka on 10-7 = 3 metriä (ei 10 + 7 = 17m).
- t = aika. Tämä muuttuja on yksinkertainen ilman selitystä, yleensä mitattu sekunteina.
- Tässä yhtälössä muuttujat ovat:

Ota yhtälön derivaatti. Yhtälön derivaatti on toinen yhtälö, joka näyttää etäisyyden kaltevuuden tiettynä ajankohtana. Jos haluat löytää yhtälön derivaatan siirtymäetäisyyden perusteella, ota funktion erotus seuraavan yleisen säännön mukaisesti laskeaksesi johdannainen: Jos y = a * x, Johdannainen = a * n * x. Tämä koskee kaikkia yhtälön t-puolella olevia termejä.- Toisin sanoen, alkaa saada ero vasemmalta oikealle yhtälön "t" -puolella. Aina kun kohtaat muuttujan "t", vähennät eksponentin yhdellä ja kerrotaan termi alkuperäisellä eksponentilla. Kaikki vakiotermit (termit ilman "t": tä) katoavat, koska ne kerrotaan 0: lla. Prosessi ei todellakaan ole niin vaikeaa kuin luulisi - otetaan esimerkkinä yllä olevan vaiheen yhtälö:
s = -1,5t + 10t + 4
(2) -1,5t + (1) 10t + (0) 4t
-3t + 10t
-3t + 10
- Toisin sanoen, alkaa saada ero vasemmalta oikealle yhtälön "t" -puolella. Aina kun kohtaat muuttujan "t", vähennät eksponentin yhdellä ja kerrotaan termi alkuperäisellä eksponentilla. Kaikki vakiotermit (termit ilman "t": tä) katoavat, koska ne kerrotaan 0: lla. Prosessi ei todellakaan ole niin vaikeaa kuin luulisi - otetaan esimerkkinä yllä olevan vaiheen yhtälö:
Korvaa "s" sanoilla "ds / dt". Osoittaaksemme, että uusi yhtälö on alkuperäisen neliön johdannainen, korvataan "s" symbolilla "ds / dt". Teoriassa tämä merkintätapa on "s: n johdannainen t: n suhteen". Yksinkertaisempi tapa ymmärtää tämä merkintä, ds / dt on minkä tahansa pisteen kaltevuus alkuperäisessä yhtälössä. Esimerkiksi yhtälön s = -1,5t + 10t + 4 kuvaaman etäisyyden kaltevuuden löytämiseksi ajankohtana t = 5, korvataan t: llä "5" yhtälön johdannaisessa.
- Yllä olevassa esimerkissä yhtälön derivaatti näyttää tältä:
ds / dt = -3t + 10
- Yllä olevassa esimerkissä yhtälön derivaatti näyttää tältä:
Korvaa t: n arvo uudessa yhtälössä hetkellisen nopeuden löytämiseksi. Nyt kun meillä on johdannaisyhtälö, hetkellisen nopeuden löytäminen kulloinkin on erittäin helppoa. Sinun tarvitsee vain valita t-arvo ja korvata se johdannaisyhtälöllä. Esimerkiksi, jos haluamme löytää hetkellisen nopeuden t = 5, meidän on vain korvattava t: llä "5" johdannaisyhtälössä ds / dt = -3t + 10. Ratkaistaan yhtälö näin
ds / dt = -3t + 10
ds / dt = -3 (5) + 10
ds / dt = -15 + 10 = -5 metriä sekunnissa- Huomaa, että käytämme yksikköä "metriä / sekunti" yllä.Koska ratkaisemme ongelman siirtymällä metreinä ja ajan sekunteina, ja nopeus on siirtymä ajassa, tämä yksikkö on sopiva.
Osa 2/3: Hetkellisen nopeuden arvioiminen graafisesti
Kuvaa kohteen liikkumisetäisyys ajan mittaan. Edellä mainitussa osassa sanoimme, että johdannainen on myös kaava, jonka avulla voimme löytää kaltevuuden mistä tahansa johdannaisen yhtälön pisteestä. Itse asiassa, jos näytät kohteen liikkuvan etäisyyden kaaviossa, Kuvaajan kaltevuus missä tahansa pisteessä on kohteen hetkellinen nopeus kyseisessä pisteessä.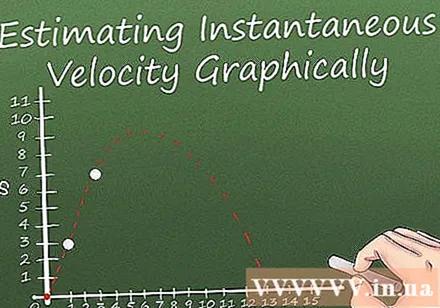
- Liikkeen etäisyyksien piirtämiseksi käytä x-akselia ajan suhteen ja y-akselia siirtymässä. Sitten määritetään pisteiden määrä kytkemällä t: n arvot liikeyhtälöön, tulos on s-arvot ja pistät pisteet t, s (x, y) kaavioon.
- Huomaa, että kaavio voi ulottua x-akselin alle. Jos objektin liikettä osoittava viiva menee alas x-akselia, se tarkoittaa, että esine liikkuu taaksepäin alkuperäisestä asemastaan. Yleensä kaavio ei ulotu y-akselin taakse - emme yleensä mittaa ajassa taaksepäin liikkuvien kohteiden nopeutta!
Valitse piste P ja piste Q, joka sijaitsee lähellä kuvaajaa P kaaviosta. Kaavion kaltevuuden löytämiseksi pisteestä P käytämme "rajahaku" -tekniikkaa. Rajan löytäminen tarkoittaa kahden pisteen (P ja Q (piste lähellä P: tä) ottamista käyrältä ja näiden kahden pisteen yhdistävän viivan kaltevuuden löytämistä toistamalla tämä prosessi, kun P: n ja Q: n välinen etäisyys lyhenee. vähitellen.
- Oletetaan, että siirtymäetäisyydellä on pisteitä (1; 3) ja (4; 7). Tässä tapauksessa, jos haluamme löytää kaltevuuden kohdasta (1; 3), voimme asettaa (1; 3) = P ja (4; 7) = Q.
Etsi kaltevuus P: n ja Q: n välillä. P: n ja Q: n välinen kaltevuus on P: n ja Q: n y-arvojen ero verrattuna P: n ja Q: n x-arvojen eroon. Toisin sanoen, H = (yQ - yP) / (xQ - xP), missä H on kahden pisteen välinen kaltevuus. Tässä esimerkissä kaltevuus P: n ja Q: n välillä on:
H = (yQ - yP) / (xQ - xP)
H = (7-3) / (4-1)
H = (4) / (3) = 1,33
Toista useita kertoja siirtämällä Q lähemmäksi P. Tavoitteena on kaventaa P: n ja Q: n välistä etäisyyttä, kunnes ne saavuttavat yhden pisteen. Mitä pienempi etäisyys P: n ja Q: n välillä on, sitä lähempänä äärettömän pienen segmentin kaltevuus on pisteen P kaltevuuteen. Toista muutama kerta esimerkkikaavallemme pisteitä (2; 4 , 8), (1,5; 3,95) ja (1,25; 3,49) antavat Q: n ja P: n alkukoordinaatit ovat (1; 3):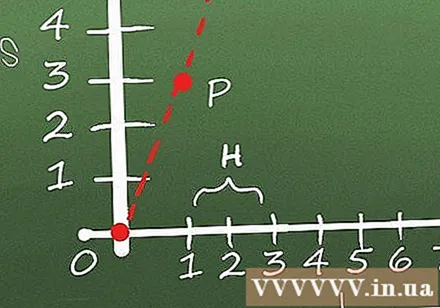
Q = (2; 4,8): H = (4,8-3) / (2-1)
H = (1,8) / (1) = 1,8
Q = (1,5; 3,95): H = (3,95 - 3) / (1,5 - 1)
H = (0,95) / (0,5) = 1,9
Q = (1,25; 3,49): H = (3,49 - 3) / (1,25 - 1)
H = (0,49) / (0,25) = 1,96
Arvioi erittäin pienen segmentin kaltevuuden käyrällä. Kun Q tulee lähemmäksi P: tä, H tulee vähitellen lähemmäksi P: n kaltevuutta. Lopuksi hyvin pienellä viivalla H on kaltevuus P: ssä. Koska emme voi mitata tai laskea Viivan pituus on erittäin pieni, joten arvioi kaltevuus P: ssä vain, kun se on selvästi näkyvissä laskemistamme pisteistä.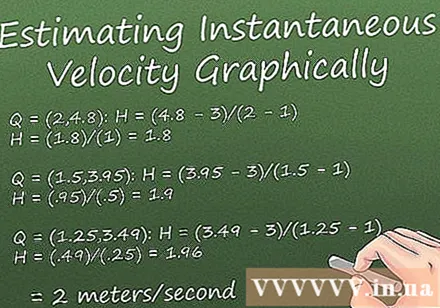
- Yllä olevassa esimerkissä, kun siirrymme H lähemmäksi P: tä, H: n arvot ovat 1,8; 1,9 ja 1,96. Koska nämä luvut ovat lähestymässä 2, voimme sanoa 2 on kaltevuuden likimääräinen arvo P: ssä.
- Muista, että kaltevuus missä tahansa kuvaajan pisteessä on johdettu graafin yhtälöstä kyseisessä kohdassa. Koska kaavio näyttää kohteen siirtymisen ajan myötä, kuten näimme edellisessä osassa, sen hetkellinen nopeus missä tahansa pisteessä on johdannainen kohteen siirtymäetäisyydestä ongelmakohdassa. Pääsy, voimme sanoa 2 metriä sekunnissa on likimääräinen arvio hetkellisestä nopeudesta, kun t = 1.
Osa 3/3: Esimerkkiongelma
Selvitä hetkellinen nopeus, kun t = 1, siirtymäyhtälöllä s = 5t - 3t + 2t + 9. Kuten ensimmäisen osan esimerkki, mutta tämä on kuutio neliöllisen sijasta, joten voimme ratkaista ongelman samalla tavalla.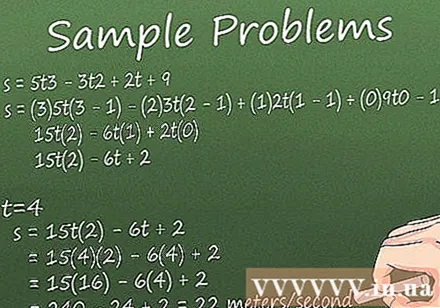
- Ota ensin yhtälön derivaatti:
s = 5t - 3t + 2t + 9
s = (3) 5t - (2) 3t + (1) 2t
15t - 6t + 2t - 6t + 2 - Sitten korvataan t (4): n arvo:
s = 15t - 6t + 2
15(4) - 6(4) + 2
15(16) - 6(4) + 2
240 - 24 + 2 = 22 metriä sekunnissa
- Ota ensin yhtälön derivaatti:
Käytä graafin estimointimenetelmää löytääksesi hetkellinen nopeus (1; 3) siirtymäyhtälölle s = 4t - t. Tätä ongelmaa varten käytämme koordinaatteja (1; 3) pisteenä P, mutta meidän on löydettävä muut sen lähellä olevat Q-pisteet. Sitten meidän on vain löydettävä H-arvot ja päätettävä arvioitu arvo.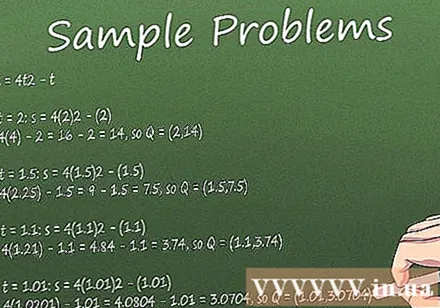
- Ensin löydetään Q-pisteet, kun t = 2; 1,5; 1.1 ja 1.01.
s = 4t - t
t = 2: s = 4 (2) - (2)
4 (4) - 2 = 16 - 2 = 14, niin Q = (2; 14)
t = 1,5: s = 4 (1,5) - (1,5)
4 (2,25) - 1,5 = 9 - 1,5 = 7,5, joten Q = (1,5; 7,5)
t = 1,1: s = 4 (1,1) - (1,1)
4 (1,21) - 1,1 = 4,84 - 1,1 = 3,74, joten Q = (1,1; 3,74)
t = 1,01: s = 4 (1,01) - (1,01)
4 (1,0201) - 1,01 = 4,0804 - 1,01 = 3,0704, joten siinä se on Q = (1,01; 3,0704) - Seuraavaksi saadaan H-arvot:
Q = (2; 14): H = (14-3) / (2-1)
H = (11) / (1) = 11
Q = (1,5; 7,5): H = (7,5-3) / (1,5-1)
H = (4,5) / (0,5) = 9
Q = (1,1; 3,74): H = (3,74 - 3) / (1,1 - 1)
H = (0,74) / (0,1) = 7,3
Q = (1,01; 3,0704): H = (3,0704-3) / (1,01-1)
H = (0,0704) / (0,01) = 7,04 - Koska H-arvot näyttävät olevan lähempänä 7: tä, voimme sanoa sen 7 metriä sekunnissa on likimääräinen arvio hetkellisestä nopeudesta koordinaatissa (1; 3).
- Ensin löydetään Q-pisteet, kun t = 2; 1,5; 1.1 ja 1.01.
Neuvoja
- Kiihtyvyyden (nopeuden muutos ajan suhteen) löytämiseksi käytä ensimmäisen osan menetelmää saadaksesi siirtymäyhtälön derivaatan. Ota sitten johdannainen uudelleen juuri löytämällesi johdannaisyhtälölle. Tuloksena on, että sinulla on yhtälö kiihtyvyydelle tiettynä ajankohtana - sinun tarvitsee vain kytkeä aika.
- Y: n (siirtymäetäisyyden) ja X: n (ajan) välistä suhdetta osoittava yhtälö voi olla hyvin yksinkertainen, koska Y = 6x + 3. Tällöin kaltevuus on vakio eikä sitä tarvitse ottaa johdannainen laskee kaltevuuden, toisin sanoen se seuraa lineaarisen kuvaajan perusyhtälömuotoa Y = mx + b, eli kaltevuus on 6.
- Siirtymäetäisyys on kuin etäisyys, mutta sillä on suunta, joten se on vektorimäärä ja nopeus on skalaarinen määrä. Matkaetäisyydet voivat olla negatiivisia, kun taas etäisyydet voivat olla vain positiivisia.



